空間測定事業 – 3Dレーザースキャナー計測受託

空間測定事業 – 3Dレーザースキャナー計測受託

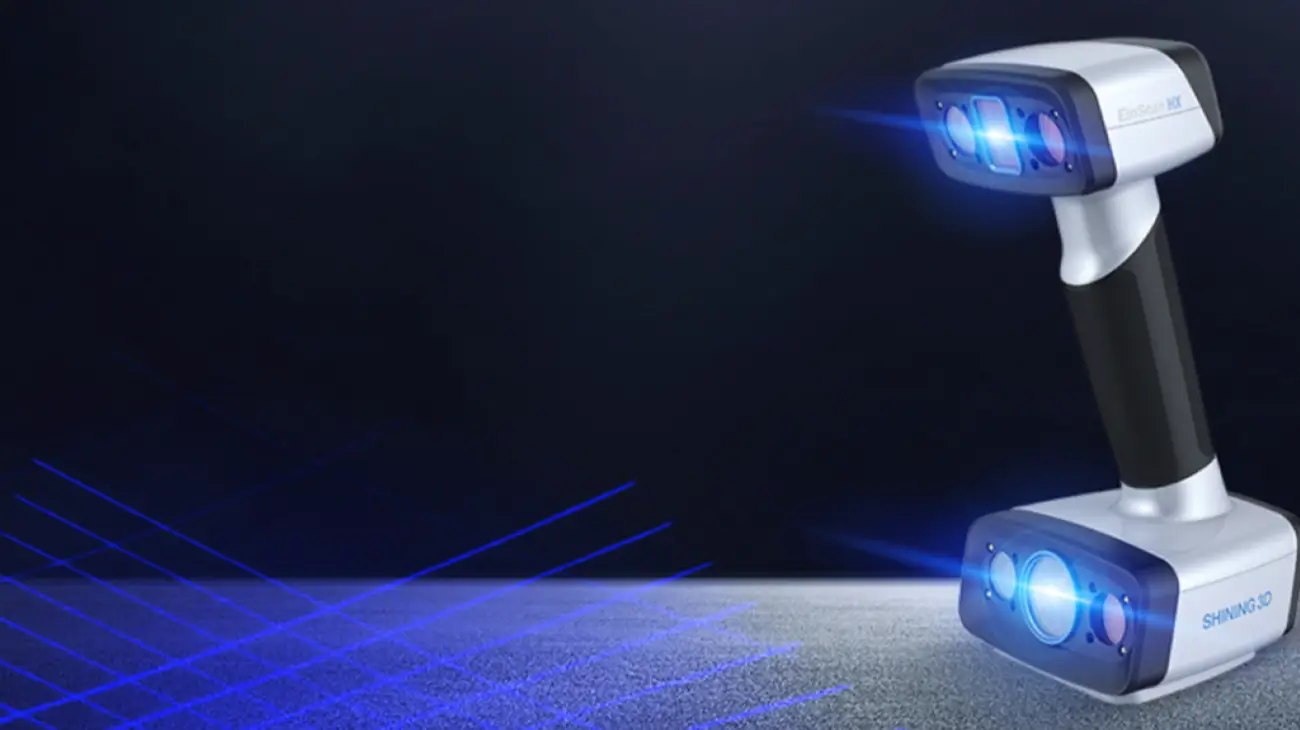
3Dレーザースキャナーは回転するミラーから射出されたレーザーが対象物との距離と角度を計測し座標を取得する3次元測定器です。1秒間に数万〜数十万の座標を取得することが可能で取得されたデータは「点群データ」と呼ばれます。
測定可能距離は最大で半径350mです。
屋外・屋内、夜間昼間を問わず計測することが可能です。またレーザーは不可視で安全なクラス1を使用しているので、他の作業者や通行人への影響はありません。
点群データは正確かつ短時間で現況計測を必要とするあらゆる業界(建築、土木、プラントエンジニアリング、工場設備管理、科学捜査、映画、ゲームなど)で使用されています。
主な3Dレーザースキャン計測実績
建築建設分野
ビルの屋外・屋内の現況計測、橋梁・橋脚などの大型インフラ、駅構内などの公共施設の計測
プラントエンジニアリング
製鉄プラント、石油プラント計測、機械室などサブコン関連の計測業務
文化財遺跡調査
重要文化財のアーカイブ、モデル化。古墳などの遺跡調査。
3Dレーザースキャナーが必要とされる場所
BIM(ビルディング・インフォーメーション・モデリング)

既設のビルの改修工事にBIMを適用する場合3Dモデリングは現地調査に基づいて設計する必要があります。
複雑な配管を伴う箇所や、複数の装置がある機械室は人力のみでの計測は多大な時間がかかり、時には測り忘れや測り間違いによる再計測(手戻り)も発生し本来の設計業務のタイムスケジュールにネガティブなインパクトを与えます。
3Dレーザースキャナーをビルの現況調査に用いることで、計測時間の短縮・測り忘れによる手戻りの防止・高所作業の不要による安全への貢献が期待できます。
文化財アーカイブ・考古学

歴史的建造物の保存は常に火災や地震、その他災害による消失のリスクが伴います。万が一損壊した場合には過去の写真や熟練した職人による膨大なコストが発生します。
3Dレーザースキャナーによる文化財の記録保存は消失リスクへの確実な対応策として復旧データを将来へ残すことができます。また一般公開が難しい建物のバーチャルツアーにも活用の範囲が広まっています。
震災復興に貢献する点群データ
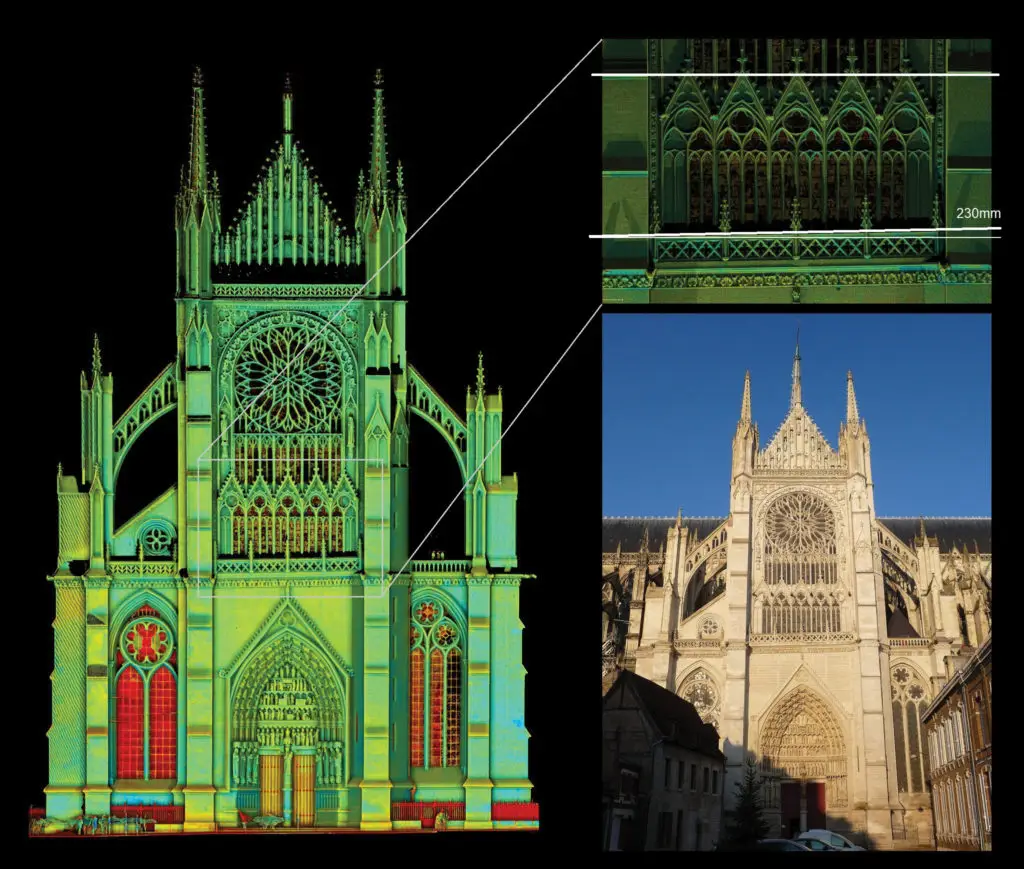
2016年に発生した熊本地震においては倒壊した熊本城の石垣の損壊状況の調査に3Dレーザースキャナーが利用されました。倒壊しなかった石垣においても3Dレーザースキャナーによる計測を行ったところ不自然に膨らんだ箇所が見つかり今後の地震対策の優先順位や対策方法についての検討材料として有効に活用されています。2019年にはフランス・パリにあるノートルダム大聖堂で大規模な火災が発生しその雄壮な姿が大きく損なわれてしまいました。復旧作業においては過去に計測されていた点群データが復旧の手がかりとして活用されています。
点群データを用いたバーチャルツアー

重要文化財に指定されている京都文化博物館別館(旧日本銀行京都支店)において点群データの中を自由に歩き・飛び回れるVRバーチャルツアーが実施されました(リンク)。屋根裏や建物の俯瞰など普段立ち入ることのできない箇所をリアルに見ることができ、文化財保護の意識向上の観点において貢献しています。
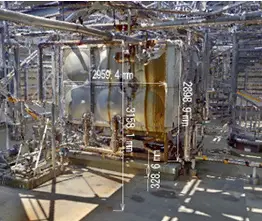
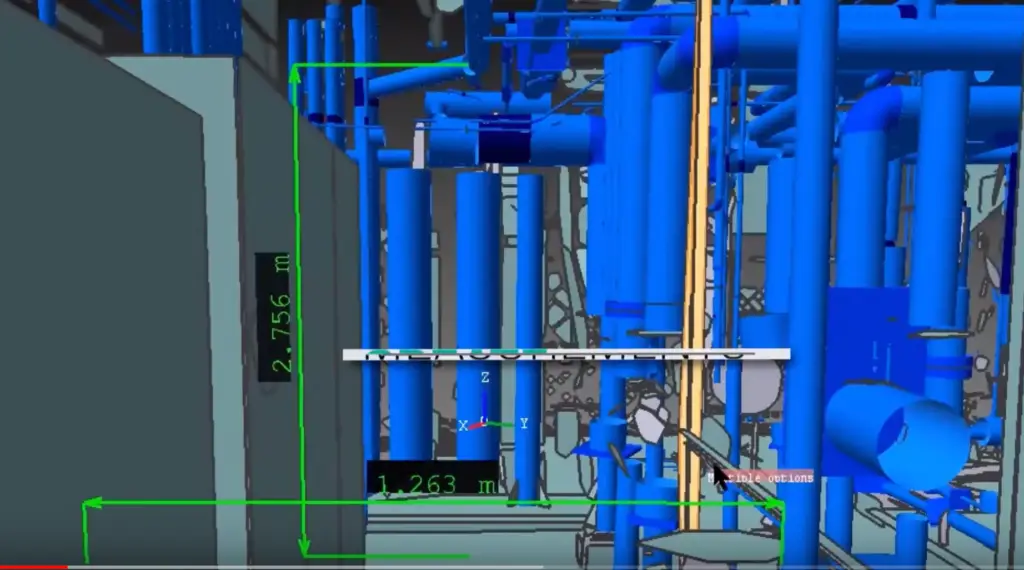
工場・プラント・エンジニアリング

複雑な配管や生産ラインがひしめく工場・プラントにおいて改修工事のための現況計測は大規模で時間がかかる作業です。
3Dレーザースキャナーで取得された点群データを用いることで、新規設置設備の搬入ルートの検討、新設配管のルート検討、レイアウト検討が机上で速やかに行うことが可能です。

ゲーム・映像・広告

ゲームや映画で用いられるCGの作成は現実世界のスケッチ・写真などから制作される場合があります。3Dスキャナーで取得された点群データから3D CADデータ、CGデータを制作することも可能です。
広告業界においてはCGを制作せずとも点群データそのものを使用することでクライアントへの広告設置案を効果的に訴求する事ができます。
3Dレーザースキャナー 計測と作業手順
3Dレーザースキャナーの測定業務は大きく分けて3つの工程に分かれます。

1.計測 – 三脚に置いた3Dレーザースキャナーのスタートボタンを押して計測を開始します。計測速度は点群の密度、カラー写真取得の有無により異なりますがおおむね一回のスキャンは5-10分程度です。レーザーは遮蔽物(配管や壁など)の向こう側は計測できないので計測位置を変えて複数回測定を行います。FARO 3DレーザースキャナーFocusシリーズはバッテリーで4時間程駆動します。スペアバッテリーを用意すれば電源が無い場所でも終日計測を続けることが可能です。
2.前処理(レジストレーション) – 計測が終了したら取得したデータの結合を行います。この作業は別名「登録」「レジストレーション」と呼ばれます。複数のデータを結合させるためにソフトウェアが必要となります。データの結合にはいくつかの方法がありますが代表的な方法は「ターゲット・レジストレーション」と「ベストフィット・レジストレーション」の2つの方法です。ターゲット・レジストレーションは計測時に球体などのターゲットを物理的に配置しスキャンする際にデータに映り込むように配置します。このターゲットが3つ以上あれば2つのデータは共通点としてターゲットを認識して結合されます。一方ベストフィットは2つのスキャンから見えている共通の箇所(おおくは壁・天井・床)を重ね合わせて結合させる手法です。それぞれのメリット・デメリットですが、「ターゲット・レジストレーション」は屋外で平面等の幾何学的形状が少ない際に有利ですが、ターゲットを入りする手間がかかります。「ベストフィット・レジストレーション」はターゲットを配置する手間が省けるため計測速度が大幅に向上しますが、前述のとおり屋外において平面等の幾何学形状が少ない場合は結合結果が芳しくない時があります。
3. 前処理(ノイズ処理) – 不要なデータを削除する作業です。不要なデータとは「映り込んでしまった人や車」やレーザー測定の特性上現れる「引きノイズ」また草木などの「植生物」が挙げられます。最近では優秀なソフトウェアの登場によりこれらのノイズはほぼ自動で削除する事が可能になっています。
4.前処理(着色) – スキャン時にカラーカメラで撮影を行っていた場合は点群に色情報を付加させる事が可能です。色情報がついた点群データは「X・Y・Z」に加えて「R・G・B」が付加された6列のデータとなります。(厳密言うとこれ以外にレーザーの跳ね返りの強さを表す反射強度(Intensity)もふかされます)。点群に色情報を追加するメリットは表示される点群がより現実世界に近く見えて専門家でなくともデータが理解しやすくなります。例えば後述する文化財アーカイブ用途においてはVRゴーグルと組み合わせてバーチャル博物館ツアーのような使いみちが可能です。これを利用する一般の方は点群データの技術的バックグラウンドを意識すること無く点群データの中を自由に歩き(飛び)回ることが可能になります。
5.前処理(座標変換) – 結合したデータの原点はスキャナーのミラー中心に原点が設定されています。点群データから3Dモデルを作成する際に座標を任意の場所へ変更する必要がありますが、座標系を構成する要素を選択すれば原点の変更は容易に可能です(3平面の交点など)。また土木測量分野においては測量士が現場で測量した座標と点群データを同じ座標系に乗せる必要があります。これを実現するための一般的な方法としては道路上に配置された基準点測量点状にターゲットを配置して基準点とターゲット中心点との差分をZ座標に追加させる方法です。
6. 後処理 – 前述の2-5までの作業は一般的に「前処理」と呼ばれます。料理で言えば下ごしらえの状態です。3Dレーザースキャナーを用いて取得された点群データの使いみちは多岐に分かれますが下記に詳細をご紹介します。
InfiPoints形式・その他ご要望の納品形式に対応します。
ご使用目的に応じてInfiPointsビューア形式、E57点群、LASなどご要望の形式での納品に対応します。
3Dレーザースキャナー導入支援も対応しています。
計測業務を内製化することでコストダウン、ダウンタイムが見込めます。また目的に応じた適切なソフトウェアの導入を支援します。